Both area and mass moments of inertia may compute themselves using the composite components technique, similar to what we did with centroids, as an alternative to integration. The correction for a position is an essential element of this procedure that was missing from centroid computations. As we all know, the area and mass moments of inertia determine themselves by the rotational axis. Only when the components of the body are around the same axis can their moments of inertia be summed. However, the moments of inertia in the table are typically within the centroid of that form.
If you want to know more on this topic, you’re welcome here. Read on as we dissect the facts about the theorem.
Parallel Axis Theorem definition
The parallel axis theorem uses the following equation to link the moment of inertia about any axis to its value around a parallel axis running through the center of mass.
I = Ic + Md2
The moment of inertia about the center of mass and the distance between the two axes, respectively, are IC and d. The above relationship is no longer valid if the reference axis does not pass through the center of mass. We address two degrees of extension of the parallel axis theorem in this paper. The moment of inertia around any two parallels, whether or not they pass through the center of mass, is related at the first level. The inertia tensor about any point will connect to the inertia tensor about any other matter. Set of an axis parallel to the collection of the axis of the first point is at the highest degree of generalization. It is the most generalized form of the parallel axis theorem.
The first generalization is easy to understand. The parallel axis theorem makes it simple to link the moments of inertia along any two parallel axes by connecting them through the center of mass.
𝐼2=𝐼+(𝑑2−𝑑1)
The moment of inertia is popular as the distance between the center of mass and the rotation axis. The situation of higher generality is more difficult since the moments of inertia and the products of inertia vary.
We may use a similar approach to find other moments of inertia and products of inertia. They depict the shift in inertia moment. As seen in the images, it shows a “paraboloid” with its minimum in the center of mass. The moment of inertia paraboloid is axially symmetric about the axis that passes through the center of mass.
Parallel Axis Theorem Formula
We may find rotational inertia in a wide range of scientific areas. It links to the structure of atomic nuclei, molecules, and neutron stars, for example. Furthermore, in the design of wind turbines, rotational inertia is critical. Artificial limbs, robotics, 3D printing, and a variety of other applications benefit from it. Asymmetric matrix describes an object’s rotational inertia mathematically. It’s also the inertia tensor’s components. The diagonal terms represent the moments of inertia about the three orthogonal axes x, y, and z. The products of inertia in directions perpendicular to the axial rotations are the off-diagonal terms.
In general, the elements of the inertia tensor are recognizable as the origin of coordinates and the relative orientations of the three axes to the object. Due to the object’s shape, calculating inertia tensor components about certain places are more accessible than calculating them about others. Finding simple relations among the inertia tensors about different locations is therefore convenient. If such relationships exist, the issue of determining the object’s inertia tensor around any area becomes easy.
The parallel axis theorem and the perpendicular axis theorem are two theorems that also connect the moments of inertia about various axes. 9 However, the utility of those theorems is limiting. For example, in the parallel axis theorem, the reference axis should travel through the object’s center of mass. The perpendicular axis theorem only applies to things that stay within a plane.
The formula of the Parallel Axis Theorem is: I =Ic+Mh^2
Here, I = moment of inertia of the body
Ic = moment of inertia about the center
M = mass of the body
h2 = square of the distance between the two axes
Parallel Axis Theorem statement
According to the parallel axis theorem, a body’s moment of inertia about any axis is identical to the body’s moment of inertia about a parallel axis through its center of mass. Thus we also need to plus the product of the group of the body and the square of the perpendicular distance between the two parallel axes.
Parallel Axis Theorem in Engineering Mechanics
This theorem is used commonly in engineering to get a body’s moment of inertia using the composite components technique. You must first divide your area or volume into elemental forms. Make sure each unique form is present in the moment of inertia table. Holes or cuts can also be treated as negative area or mass.
After that, you’ll make a table to keep track of the values. Include a final “total” row that we will utilize for some deals. Devote a row to each section that you numbered previously.
The columns will differ somewhat, but
What we will need in general:
It is the area or mass (area for area moments of inertia or mass for mass moments of inactivity) for each component. However, we have to remember to indicate cutouts as hostile regions or groups.
- The position of the centroid or center of mass.
- Most of the time, we’ll be looking for the moment of inertia at the composite shape’s centroid, and if not, you’ll have to figure it out before moving on. See the page “Centroids and Center of Mass using Composite Parts Method” for additional information.
- The values of the moment of inertia stay around the centroid of each form. To get these values, use formulae on the moment of inertia table to enter in quantities for height, radius, mass, and so forth. If the shape’s orientation in the table does not match the direction of the form in your diagram, you may need to rotate the body mentally and, therefore, swap equations, so don’t apply these formulae blindly.
- Each shape’s adjustment distances (r). For this number, you’ll need to know how far the x-axis, y-axis, or z-axis moves from the piece’s centroid to the overall centroid or location. This is usually where the moment of inertia . You’ll generally discover the horizontal, vertical, or diagonal distances between component centroids and the overall centroids stated earlier in the table to compute these values.
- Finally, you’ll get a column of corrected inertia moments. For this modified value, take the initial moment of inertia about the centroid and multiply it by your area times r squared term or mass times r squared term.
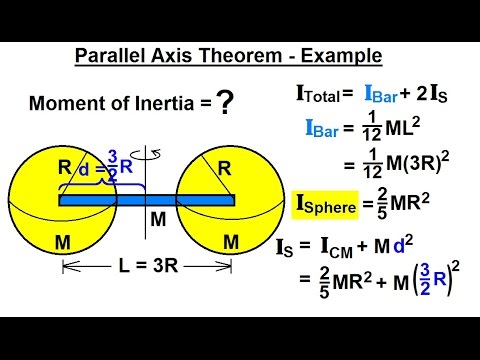
Parallel Axis Theorem example
Two .2 meter diameter spheres, each weighing 40 kg, are also linked to the ends of a.6 meters long, 20-kilogram thin rod to form a dumbbell. Hence, Calculate the dumbbell’s mass moment of inertia around the y axis in the diagram.
Parallel Axis Theorem area moment of inertia
The moment of inertia is a phrase that also describes a cross-ability section’s to resist bending. Though, it’s usually thought of in terms of a reference axis. It’s a section’s mathematical attribute that deals with the surface area and its distribution along the reference axis (axis of interest). A centroidal axis is commonly used as the reference axis.
The Second Moment of the Area is another name for the moment of inertia.Read Also: Amensalism: Examples & Definition
The square root of the quotient of the moment of inertia divided by the area is the radius of gyration of a room concerning a specific axis. It’s the distance at which the complete area must be considered to be concentrated for the product of the site and the square of this distance to match the actual area’s moment of inertia around the specified axis. The radius of gyration, in other words, defines how the entire cross-sectional area is spread around the centroidal axis. It will be more resistant to buckling if more space spreads away from the axis. A circular pipe is the most effective column section for buckling resistance.
Parallel Axis Theorem proof
First step
Determine the mass dm of a tiny volume element. The vector ride connects point S to the mass element, rdm connects the center of mass to the mass element, and rScm connects point S to the center of mass.

r→S,dm=r→S,cm+r→dm
At this stage, the notation becomes more complex. The component vectors r, dm parallel to the axis through the center of mass and r,dm perpendicular to the axis through the center of mass make up the vector rdm. The perpendicular component vector’s magnitude is similar to the equation.
A component vector exists for the vector. This component vector runs parallel to the axis via point S. Through point S. It is perpendicular to the axis. The vertical component vector’s magnitude is shown below.
r→S,Icm=dS,cm
Second step
Note that if we had merely determined that the two parallel axes are parallel to the direction, we would have arrived at this conclusion. With the triple subscripts, we might have saved a few steps and perhaps avoided some notation. However, we’d want a broader outcome. This is true when the axes are not fixed or when the axes of various items in the same issue are different. Consider a rotating bicycle with a non-parallel wheel axis or a spinning top that precesses (wobbles). We will examine such examples later. We also will demonstrate the generic case of the parallel axis theorem in anticipation of its application to more broad situations.
The moment of inertia about the situation is
IS=∫body dm(rS,⊥,dm)2
The perpendicular component of the location of the center of mass is integral. It has to do with the center of mass. As a result, we come to a conclusion that
2∫body dm(r→S,⊥,cm⋅r→⊥,dm)=0
As a result, the moment of inertia equals the sum of the equation’s first two integrals.
IS=Icm+md2Scm
Thus it proves the parallel axis theorem.